
ADVERTISEMENT
市面上大多數無人機都是旋翼四軸飛行器,它們幾乎可以在任何地方方便地起降。問題是,它這類無人機的能源效率不如固定翼飛行器,後者能飛行更長距離並在空中停留更久,但需要跑道、專用發射器,或者至少需要良好的投擲才能升空。
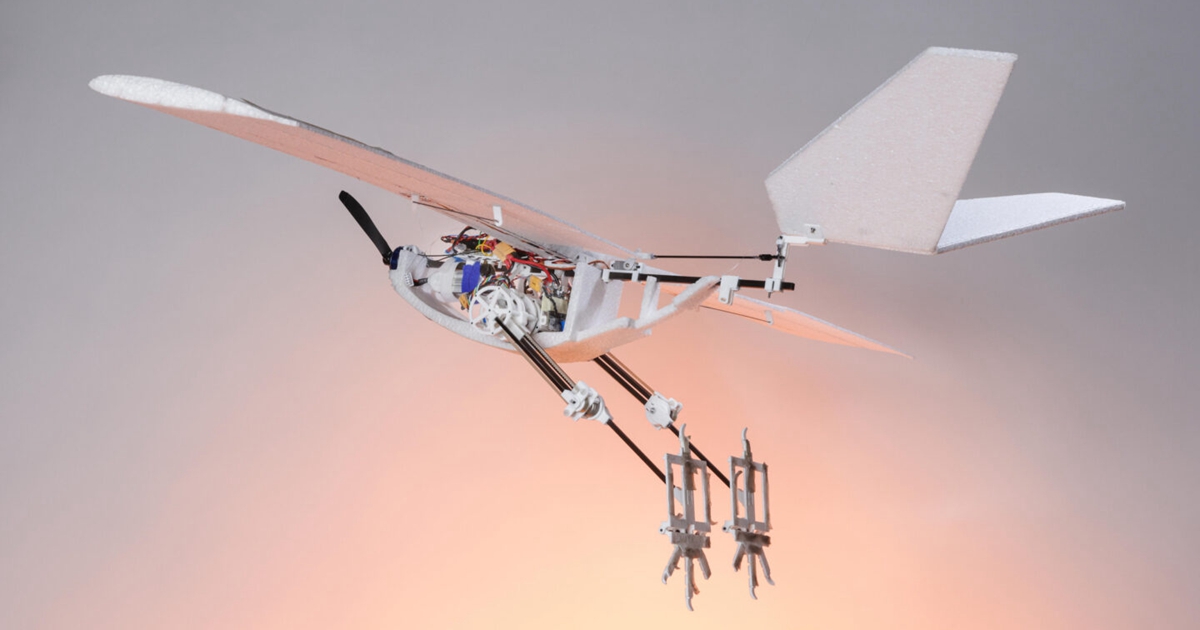
為了克服這個限制,瑞士洛桑聯邦理工學院的一個研究團隊建造了一個名為 RAVEN(Robotic Avian-inspired Vehicle for multiple ENvironments,適用於多種環境的機器人鳥類啟發飛行器)的固定翼飛行機器人,它具有一種獨特的仿生起落架:一對類似鳥類的機器腿。「RAVEN 機器人可以行走、跳過障礙物,並像真正的鳥類一樣跳躍起飛,」領導該專案的工程師工程師申元東(Won Dong Shin)表示。。
智慧的設計選擇
為無人機安裝腿部的主要挑戰是,它們會顯著增加質量(mass)和複雜性。最先進的機器人腿是為在地面上行走的機器人設計的,它們體積龐大且笨重,根本無法考慮用於飛行器。因此,申元東的團隊首先仔細研究了各種鳥類的腿部質量預算。
結果發現,鳥類的腿部質量與全身重量的比例通常隨著體型的增大而增加。一隻渡鴉的雙腿重量約為100克,團隊便以此為參考。
申元東和他的團隊製造的機械腿與真實鳥腿非常相似。為了減輕重量,他們略過了膝關節和主動控制的腳趾關節,只設計了兩段式肢體,並將64%的重量集中在髖關節附近。該機械結構由標準無人機的螺旋槳驅動,踝關節通過滑輪和同步帶進行控制。機械腿的末端是一隻具有三根前向腳趾和一根後向趾爪(稱為跗爪)的腳。
此外,該設計還採用了更精密的仿生設計。「我在踝關節內嵌入了一個扭力彈簧。當機器人的腿蹲下時,彈簧會儲存能量,而當腿伸展時,彈簧與電機協同工作以產生更高的跳躍速度。」申元東解釋道。這種彈簧的功能模仿了鳥類在跳躍起飛過程中利用肌腱系統儲存和快速釋放彈性能量的機制。結果顯示,這一設計使跳躍速度提高了25%。
最終,機械腿的重量約為230克,雖然比渡鴉真實的雙腿重得多,但這已足以讓RAVEN完成行走、跳躍、起飛和飛行等任務。
如渡鴉般高效
該團隊計算了體重分別為490克和780多克的兩種鳥類所需的起飛速度;它們分別為每秒 1.85 米和每秒 3.21 米。基於此,申元東認為 RAVEN 機器人需要達到每秒 2.5 米才能起飛。使用類似鳥類的跳躍起飛策略,它可以在短短 0.17 秒內達到這個速度。
那麼,大自然的首選起飛方式與其他升空方式相比如何呢?其他選擇包括墜落起飛,也就是將飛機推下懸崖,讓重力發揮作用;或者站立起飛,也就是將飛機垂直放置,依靠螺旋槳將其向上 lifting。 「當我設計實驗時,我認為跳躍起飛的能源效率最低,因為它使用了電池中的額外能量來驅動腿部,」申元東說。但他感到驚訝。
「我們所說的能源效率,是指計算能源輸入與輸出的比例。能量輸出包括起飛瞬間的動能和勢能,而能量輸入則是起飛過程中測量的功率消耗。」申元東解釋說。能量輸入是透過測量起飛過程中使用的功率來計算的。
「結果表明,跳躍起飛實際上是最節能的策略。我沒想到會是這樣的結果。這很令人驚訝」,申元東說。
跳躍起飛的能量成本略高於其他兩種策略,但差距不大。它比站立起飛多消耗 7.9% 的能量,比墜落起飛多消耗 6.9% 的能量。同時,它產生了更高的加速度,因此你的投入得到了更好的回報(至少就能量而言)。總體而言,用鳥類般的腿跳躍的效率是站立起飛的 9.7 倍,是墜落起飛的 4.9 倍。
團隊的計算中存在一個限制,即傳統設計的固定翼無人機(例如使用輪子或發射器的設計)在常規起飛策略中會比裝有雙腿的RAVEN更節能。「但仔細想想,鳥類如果沒有雙腿也能飛得更好,然而牠們需要雙腿在地面移動或捕獵。你要在飛行效率和更多功能之間進行取捨。」申表示。而雙腿提供了許多功能。
面臨的挑戰
為了展示這款飛行機器人腿部設計的多功能性,申元東的團隊安排了多項標準無人機無法完成的任務。測試場景包括穿越低矮的天花板、跳過裂縫以及躍上障礙物。「當機器人採取直立姿勢且尾部觸地時,即使沒有高級控制器,它也能穩定行走。」申表示。行走能解決低矮天花板下的移動問題;而跳過裂縫和障礙物則是利用起飛時使用的機械結構:扭力彈簧和驅動器。RAVEN能跳過11公分寬的裂縫,並躍上26公分高的障礙物。
不過,申元東指出,目前RAVEN仍需要大量改進才能真正發揮潛力。「現階段,機器人無法一次性清除所有障礙物,我們必須為每個障礙分別重新設計程式。」他說。RAVEN的控制系統尚不具備適應性,腿部驅動器執行的是預定的動作集,這些動作是團隊通過電腦模擬設計的。如果路徑中有障礙物,RAVEN可能會撞上。
另一個顯著的限制是,RAVEN目前無法用雙腿著陸。不過,這正是申元東和他的同事計劃未來改進的方向之一。
「我們希望加入一些傳感器,比如視覺或觸覺傳感器。這樣,我們就能知道著陸點的位置、距離等資訊。」申說道。RAVEN未來還將配備可折疊機翼,讓機器人能穿越狹窄空間。「拍動機翼也是一個非常有趣的研究方向。對於著陸而言,拍動機翼非常重要,因為鳥類著陸時首先用翅膀減速,而不是用雙腿。如果我們能實現拍動機翼,這將是一個真正像鳥的機器人。」申補充道。
所有這些改進都是為了讓RAVEN為搜尋與救援任務做好準備。研究團隊希望這種裝有雙腿的飛行機器人能快速抵達受災區域,必要時著陸並步行穿越崎嶇地形,隨後再次起飛,如同鳥類般靈活。「另一個應用是包裹運送。在瑞士,我經常看到直升機將包裹送到山區居民手中,這成本相當高。而鳥類般的無人機能更高效地完成這項任務。」申元東建議道。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!