
ADVERTISEMENT
當機器人混進魚群,你認得出來嗎?
來看看這條可可愛愛的小魚,七隻這樣的小魚在哈佛大學實驗室的一個暗淡的水箱中輕輕游動,用它們的大眼睛互相張望。

其實這是哈佛大學約翰 ‧ 保爾森工程與應用科學學院和威斯生物工程研究所的科學家們研發的一組魚形水下機器人,它們可以像真正的魚群一樣有默契地聚在一起,也可以自動導航並且尋找彼此,並協作完成任務。
這是科學家們第一次利用水下機器人完成複雜的3D集體行為,最近還登上了《Science Robotics》的封面。
靈感來源於淺海魚群——隱式協調
在淺海區有一種奇妙的景觀,一群群「挨挨擠擠」的魚緊挨彼此、維持隊形,它們當中的每一個成員都在不停地游動。人們不禁疑惑,它們總是以如此密集而龐大的陣容快速「行軍」,會不會連環追撞或相撞呢?
Bluebot的主要研發人員、哈佛大學的教授Nagpal也產生了同樣的疑問,她在一次潛水時看到魚成群結隊地遊走,便開始思考:「我們是不是能創造出一個機器人群體,使它們在運動時能具有像魚群一樣的群體一致性?」
其實魚群的這種行為叫做隱式協調(implicit coordination),這種分散的、具有自主性的自我組織行為成為了哈佛大學團隊開發Bluebots的靈感來源。
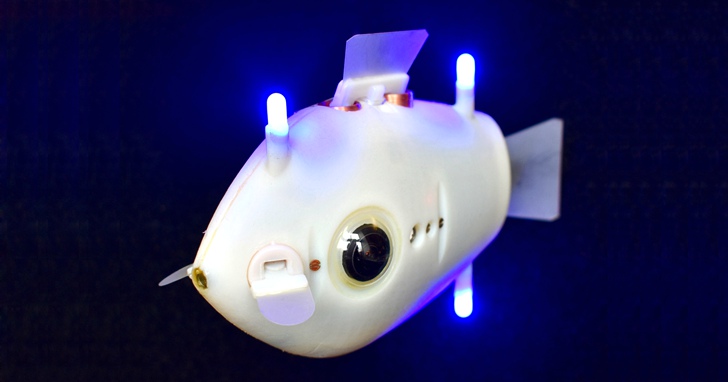
透過 3D 列印,Bluebot被製造成了魚的形狀,研究人員將自主的3D多鰭運動與3D視覺感知結合在一起。
七個Bluebot上下都被裝上了藍色LED燈,化身為藍色小精靈混入魚群,由7尾小魚組成的機器人魚群叫做Blueswarm,它們的大眼睛鏡頭可以在接近360度的視野中尋找附近的藍色LED燈光,也就是它的同類。兩個燈光之間的距離被設定為距86公分,有了這些簡單的訊息,每個Bluebot都可以確定與另一個機器人的距離。
確定和同類之間的距離只能保證它們不會追撞,但如何真正的模仿魚群的自我組織行為呢?
原來LED光源隨著每個機器人所在的位置和周邊環境可以散發出不同強弱的燈光,相機和光敏感測器可以幫助機器人作出快速的車載圖像處理,這樣每條小魚都可以對其游泳動作和發光情況進行調整,進而自動的將多個Bluebot組織成集群在水中游動。
除此之外,研究人員還利用Blueswarm視覺之間的相位匹配,做到了魚群的搜尋任務。
任務是這樣的:
第一步是分散,演算法將機器人分散開來尋找目標,進而最大化它們的距離,獲得更好的覆蓋範圍,發現目標的機會就會增加。
這場搜尋任務持續了90秒:第一隻小魚機器人在20 秒後檢測到了目標;然後在10秒鐘之內,所有其他機器人都注意到了它的警報,並開始向閃爍的LED遷移;獲光源的進入機器人也開始閃爍,以增強警報訊號;90秒後,目標被所有機器人包圍。
融入自然,開創水下機器人領域的先河
哈佛大學開發的Blueswarm機器人魚群可以說開創了水下機器人領域的先河,它不僅在外形上模仿了魚,甚至把魚的集群行為也模仿得惟妙惟肖,讓仿生機器人真正的融入了自然界。
雖然過去也出現過不少有趣的水下機器人,最常見的類型是一種「魚雷」式機器人,這種機器人在開放水域巡航時效率很高,但不適用於在珊瑚礁或碼頭的角落和縫隙中巡航。
即使我們可以輕易看出機器人魚和真正的魚之間的差別,但在魚的眼裡,它和自己沒什麼不同,Blueswarm在游動時也不會發出聲響而嚇走魚群。
哈佛大學團隊的開發人員之一,Berlinger 表示:「機器人通常被部署在人類無法接近,或是危險的地區,在這些地方,人類無法對機器人進行干預。在這種情況下,一個能夠自給自足,且具有高度自主性的群體的優勢就非常明顯。透過對隱式協調和 3D 視覺的使用,我們能夠在沒有GPS和WiFi支援的水下環境,創建一個具有高度自主性和靈活性的水下系統。」
不過還是有網友擔心:「如果被大魚吃了怎麼辦?」

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!