
ADVERTISEMENT
日本東京大學的研究人員近來研發了一款名為「Liberobot」的類人型機器人。Liberobot擁有八個關節,這八個關節採用結構整合的氣動電纜氣缸進行驅動。研究人員使用學習動力學查閱資料表(IMoLo)進行即時運動產生,以產生氣動類人型機器人的運動。
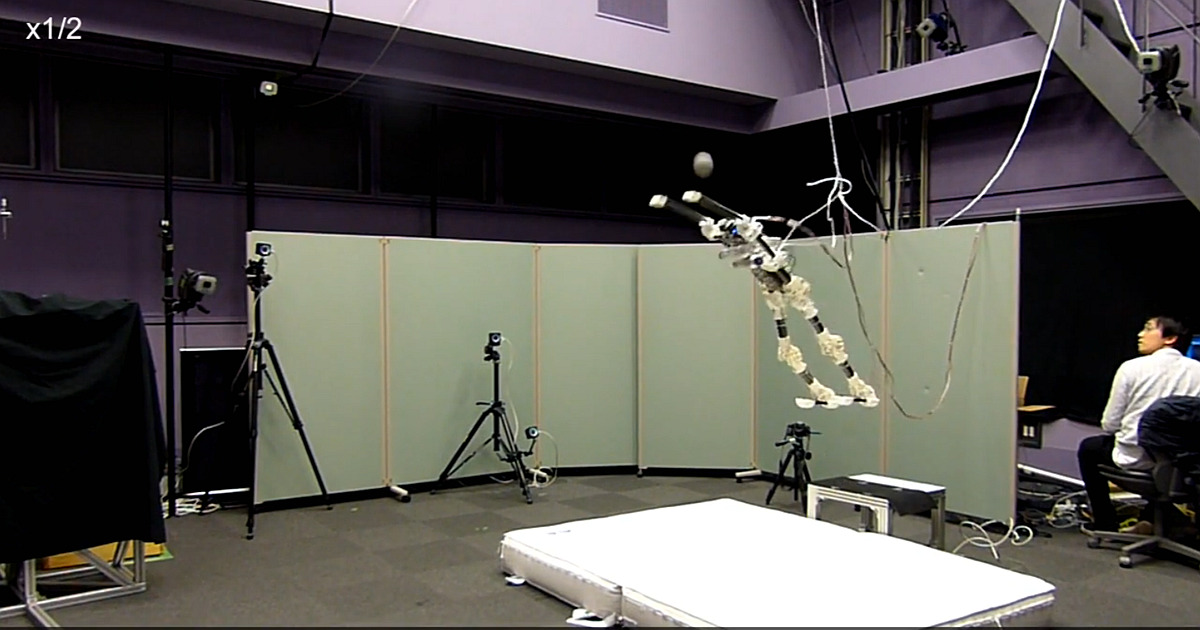
利用這種方法,機器人Liberobot可以瞬間向前跳躍並擊中空中的飛球,這類似人類排球運動員在排球運動中的表現。
實驗結果表明,使用IMoLo的氣動類人型機器人可以在指定時間內即時執行動態的全身運動,例如跳躍和擊打運動,即使是針對運動中的目標,也可以實現有效擊打。該類人型機器人是第一個能夠執行此類動態運動的氣動類人型機器人。相關研究成果在發表在SCI期刊IEEE Robotics and Automation Letters上。
對於日本東京大學的研究人員而言,他們對執行動態運動的人形機器人很感興趣。特別是,他們更關注類人型機器人的全身動態運動,這些運動是在指定時間內響應不斷變化的目標而暫態產生的。
例如跳躍和擊打運動描述了一種協調的全身動態動作,其中人形機器人必須採取準備跳躍的姿勢,接著它必須檢測運動中的球,並預測其軌跡,然後產生相應的協調運動,最終在球落地前擊中球。類人型機器人的執行系統必須能夠加速整個身體同時跳躍和擺動手臂。

氣動執行器與電動液壓執行器相比具有更高的功率重量比,而電動執行器的位置控制精度更高,而液壓執行器產生的力更大。氣動執行器雖然在機器人動態運動方面具有優勢,但對指令的回應速度較慢,位置控制的精度較低。因此,氣動類人型機器人很難透過針對變化目標的高速運動來準確地遵循其末端執行器的計畫軌跡。
日本東京大學的研究人員近來研發了一款名為Liberobot的氣動類人型機器人。並針對氣動類人型機器人開發一種立即產生和執行跳躍和打擊運動的方法。該方法使用學習動力學查閱資料表(IMoLo)進行即時運動產生,該方法使氣動類人型機器人能夠即時產生運動以響應不斷變化的目標。Liberobot類人型機器人是第一個能夠執行此類動態運動的氣動類人型機器人。
▲Liberobot氣動類人型機器人
機器人的動作行為通常使用包含頂層和底層部分的分層系統產生。利用頂層部分和底層部分的協同行動,最終完成機器人的期望運動。
日本東京大學的研究人員在研究中,目標是讓氣動類人型機器人能立即開始運動:向前跳躍,擺動手臂,並將手伸到將要擊中飛球的擊球位置。因此開發了一種產生這種運動的方法:IMoLo。
使用IMoLo的機器人可以使用查閱資料表立即產生運動,該表顯示了使用機器人的手在所需時間到達目標位置的命令的時間序列。因此,機器人也可以在適當的時間開始這種運動,並在目標時間將手伸到該位置。機器人不需要遵循任何軌跡,它只需要執行命令。
該機器人高116.3公分,寬40公分,不含電源線、區域網路(LAN)電纜和外部空氣管的重量為7.4公斤。機器人有兩條腿和兩條手臂。其每只手臂上安裝有一塊壓克力板,使其能夠擊球。該板尺寸為30×8公分,厚度為3公釐。
該機器人有八個關節:每隻手臂一個肩關節,兩條腿的髖關節、膝關節和踝關節。肩關節、髖關節和膝關節的關節活動範圍為0到150°,踝關節活動範圍為-45到+45°。肩部與臀部、臀部與膝蓋、膝蓋與腳踝之間的長度分別為 44.6公分、29公分和31公分。腳的長度是21.1公分。
實驗過程中,研究人員將球從距離機器人約5公尺的地方扔出去,並在1秒後落到機器人面前。然後機器人會根據動作設置向前跳躍並在空中擊球。研究人員利用機器從兩個不同的位置向不同方向扔球20次。結果表明,機器人在20次試驗中擊球16次,成功率為0.8,這可以說明機器人可以成功完成跳躍擊球動作。
這項研究提出了IMoLo方法,用於立即產生氣動類人型機器人的動態運動,以支援跳躍和擊打運動。類比實驗顯示,在IMoLo中使用非線性插值的類人型機器人在跳躍和擊打運動中,手到達位置的誤差大大減小。氣動類人型機器人Liberobot使用IMoLo執行不同的跳躍和擊球動作,並以0.8的成功率擊中來自不同位置的球。結果表明,氣動類人型機器人可以在目標時間內響應移動物體即時產生運動,並使用IMoLo執行這些運動。Liberobot類人型機器人是第一個能夠執行此類動態運動的氣動類人型機器人。
然而IMoLo也有一些不足。使用IMoLo的機器人需要從相同的初始狀態開始學習運動,因此,在執行學習到的運動之前,它每次都需要處於相同初始狀態。在IMoLo中進行學習模型的試驗可能會損壞機器人。因此,如何靈活安全的讓機器人學習更多的動作則是接下來的研究重點。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!