
ADVERTISEMENT
NVIDIA在GTC 22春季展發表DRIVE Map技術,以混合模式測量與繪製地圖,並預計在2024年完成勘測500,000公里道路,為Level 3、4自駕車帶來更完善的地圖資料。
多重感應器提升準確度與安全性
NVIDIA創辦人兼執行長黃仁勳在GTC 22春季展開幕演說發表DRIVE Map地圖測繪平台,是款能在大幅自動化的前提下提升安全性的多重模組(Multimodal)技術,它結合DeepMap高精確度的地圖資訊,以及以AI為基礎的群眾繪製(Crowdsourced Mapping)所帶來的大量與即時資訊。
NVIDIA也宣佈NVIDIA DRIVE Orin自動駕駛車電腦進入投產階段,並有超過25家汽車製造商採用DRIVE Orin SoC搭配DRIVE Hyperion平台開發軟體定義車輛。最新一代Hyperion 9平台將提高處理感測器資料的效能,進一步提高安全性,並擴大全自動駕駛的操作領域,其感測器套件包含14組攝影機、9組雷達、3組光達及20組超音波設備。
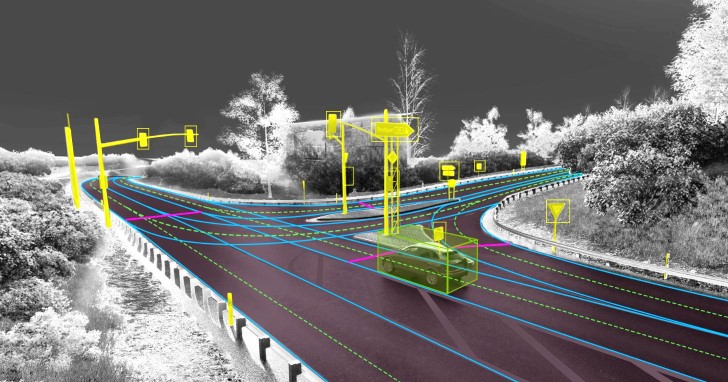
DRIVE Map的定位功能由攝影機、雷達、光達等3種不同裝置達成,並經由AI程式整合資訊以提供多樣的功能性,其中攝影機可以辨識車道分隔線、道路標記、道路邊界、交通號誌與燈號、電線桿等物件,而雷達除了可以判斷這些物件,還能在惡劣的照明或天候條件下彌補攝影機或光達的不足,並且能夠在郊區缺乏典型地圖資訊時,透過分析雷達回波來辨識景物。光達定位則有最高的精確度,其解析度高達5公分,提供最精確、最可靠的環境辨識。
另一方面,使用3種裝置的好處是安全冗餘,當其中某種裝置失效時,系統可以採用其他裝置提供的資訊進行判斷,以提高整體系統的安全性。

大地圖時代來臨
DRIVE Map的資料來自地面實況調查地圖引擎(Ground Truth Survey Map Engine)和群眾地圖引擎(Crowdsourced Map Engine)等2種不同來源,前者由專門的街景車進行街道地圖測繪,後者則由數以百萬計的車輛上傳即時資訊,達到在公分級精確的地圖上不斷更新和擴展資訊。
DRIVE Map除了可以協助行駛中的車輛,還能將數據匯入Omniverse平台製作1:1的數位孿生地球模型,並搭配 NVIDIA DRIVE Sim自駕車模擬訓練系統,加速自駕車的開發流程。
NVIDIA表示預計DRIVE Map將在2024年完成包含北美、歐洲和亞洲等區域超過500,000公里的道路的地圖,並透過數百萬車輛持續更新資料,並開放DRIVE Map給整個自駕車產業使用。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!