
ADVERTISEMENT
樂高被玩出各種新花樣已經不是新鮮事了,像這個叫大衛‧阿吉拉爾(David Aguilar)男孩因右臂發育不良,就自己利用樂高來製作了一支義肢。

也有人用樂高DIY一個高精度電動顯微鏡。
但這次的樂高絕對能讓你大吃一驚。
看到了嗎,這水中矯捷的身影,一個漂亮的U型回轉然後急速刹車,再沉著冷靜地向上浮去。
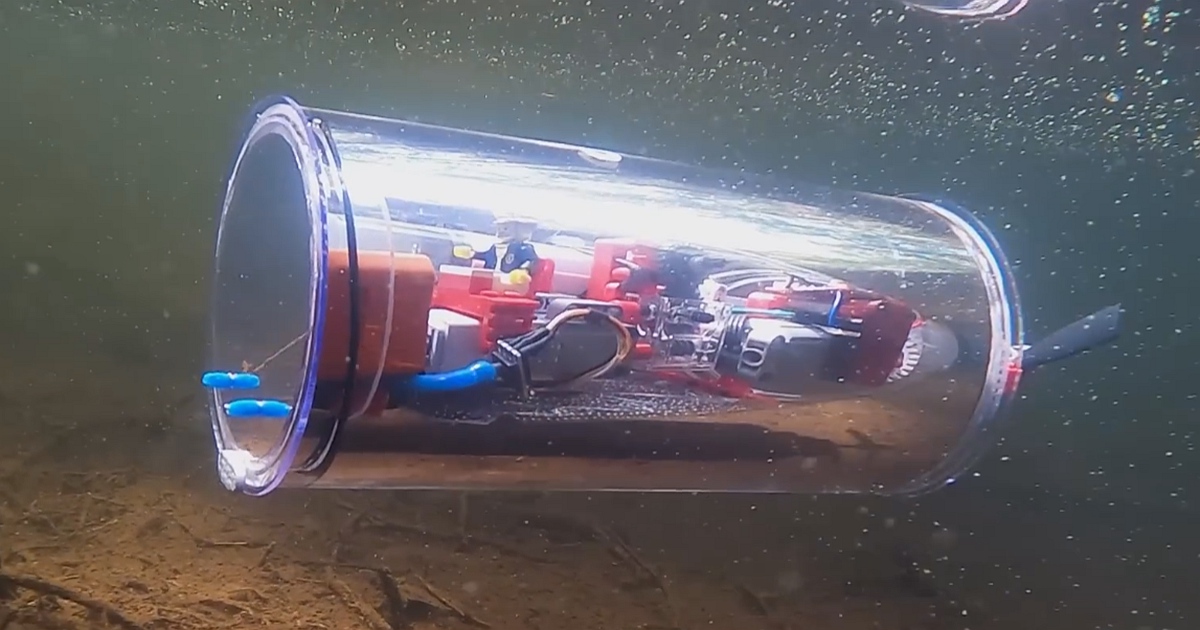
再看實際演練過程中,「船長」一臉鎮定地操作,即使是在自然的河流環境中也沒有絲毫退卻的意思。
這個潛艇正是利用樂高製作的。這部影片在YouTube上引起了熱烈討論,目前觀看人數已經接近10萬人次。有網友就直呼,「又是一個大師之作!」也有網友表示,鏡頭清晰度令人震驚,對於低成本水下遠端拍攝來說,這也是一個很好的概念驗證。
樂高和樹莓派是「絕配」!
做好準備,開工!
樂高變速箱(6588)有24:1的齒輪減速比。它需要一個蝸輪(4716) 和一個24齒齒輪(3648) 才能工作,除了將扭矩增加24倍、減少摩擦外,它還非常緊湊,很適合用在潛艇上。
接下來需要用到Python來讀取轉速表,兩個轉速計訊號可以根據哪個訊號首先變為1來瞭解旋轉方向。
tachoPower = DigitalOutputDevice(20)tachoA = DigitalInputDevice(16)tachoB = DigitalInputDevice(19)tachoAValue = tachoA.valuetachoBValue = tachoB.valuedef tachoA_rising():global tachoCountglobal tachoAValueglobal tachoBValuetachoAValue = 1if tachoBValue == 0:#A in rising edge and B in low value# => direction is clockwise (shaft end perspective)tachoCount += 1else:tachoCount-= 1def tachoA_falling():global tachoAValuetachoAValue = 0def tachoB_rising():global tachoCountglobal tachoAValueglobal tachoBValuetachoBValue = 1if tachoAValue == 0:tachoCount -= 1else:tachoCount+= 1def tachoB_falling():global tachoBValuetachoBValue = 0tachoA.when_activated = tachoA_risingtachoA.when_deactivated = tachoA_fallingtachoB.when_activated = tachoB_risingtachoB.when_deactivated = tachoB_fallingtachoPower.value = 1
注射器範圍設置在3毫升至45毫升之間。
SYRINGE_POS_MIN = 3 #syringe ballast min pos [ml]SYRINGE_POS_MAX = 45 #syringe ballast max pos [ml]SYRINGE_TACHO_COUNT = 19000 #tacho count from syringe min to max posSYRINGE_HYSTERESIS = 360 #motor+gearbox+syringe backlash/hysteresis [tacho counts]#calculate syringe positionif tachoCount > trueTachoCount:trueTachoCount= tachoCountelif tachoCount < trueTachoCount - SYRINGE_HYSTERESIS:trueTachoCount= tachoCount + SYRINGE_HYSTERESISsyringePos = SYRINGE_POS_MIN + SYRINGE_POS_MAX * \trueTachoCount / SYRINGE_TACHO_COUNT #[ml]
接下來可以製作船體部分了。
預先準備好兩個有機玻璃壓克力塑膠圓柱體,外徑11公分和10公分,長度均為25公分,厚度均為3公釐。
在螺旋槳的選擇上,主螺旋槳可以使用4x4.5的Diatone Bull Nose,在螺旋槳兩側貼一塊雙面膠帶,將帶有軸孔的圓形樂高板(4032)推到兩側, 在車軸上添加樂高半襯套(4265a) 以保持兩端安全。
接下來就可以……繼續蓋蓋子了。
再裝上壓力感測器和雷射距離感測器,就可以 準備出海了 !
帶著潛艇上路吧!
在水箱測試中,不管是壓力感測器還是雷射距離感測器,都能正常工作。
在泳池測試中,由於可施展空間更大,不管是轉彎還是用螺旋槳加速前進,也都能很好地得以驗證和演算。
在完成了初步測試後,我們還可以把潛艇放在自然界的河流裡進行最後的模擬測試。
在這段長達200公尺的行進中,潛艇不僅能躲過各種障礙物正常運轉,還拍攝到了非常清晰的水下影片。
給「船長」一個大特寫:
儘管看上去十分炫酷,但是作者也表示,前前後後整個構建過程太過複雜,可能花了300個小時左右。
同時現在有些問題要解決,像是:
- 密封嚴密且需要平衡內部壓力,端蓋部分尤其複雜
- 轉動螺旋槳太弱
- 潛艇在以最高速度行駛時不會直線行駛
- 測速脈衝有時會丟失
- 需要修復注射器位置參數
儘管目前已經做了4個版本的樂高潛艇,作者還在想對其進行改進,比如改造端蓋使其更易於安裝並添加鎖定機制,更換無線電控制板,拆下雷射距離感測器,增加轉動螺旋槳尺寸或齒輪比等等。
不知道大家對這個小潛艇有什麼看法。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!