
有關 Intel Edison(個人觀點)→Edison:創客界的賓士級開發板。去年 IDF 峰會上,Intel 推出以創客市場為主的 Edison 開發板。在這個已經不再是藍海的市場而言,在未深入了解其規格之前,以價位來看,著實會令許多人懷疑它是否真的具有競爭力。
因為,除了創客們所喜好的Arduino系列開發板之外,RaspberryPi近期也推出了第二代的四核心的開發板,再加上支援ARM mbed平台的多數開發板(如NXP)、聯發科LinkIt等等,這些開發板都是在這一、兩年陸續推出,並且也都是瞄準IOT物聯網這塊產業大餅。
本文作者:睿揚創新科技,李世欽 / 技術支援:CAVEDU教育團隊,袁佑緣、徐豐智
一、整合性高、內外皆美
以筆者從事微處理器嵌入式系統開發逾30年,所使用過的微處理器不可勝數的經驗來觀察,Intel 這次的開發板可謂來勢汹汹。以硬體規格而言,無庸置疑是目前市場上的頂級產品,深入探究其功能,更可以發現其中有些獨到的特點,值得注意:
1. 一顆 SOC 內含一個500Mhz DualCore Atom,及另一顆 X486 Pentium 架構的處理器所合成之硬體架構,並整合 Wifi、BT 功能晶片,對於嵌入式及物聯網相關省電的裝置應用極為適合(如穿戴式裝置)。
● 透過 Semaphore 機制,兩個 Processors 之間可以利用 Mutual Exclusive 取得底層資源,不會衝突。
● 可以 Eclipse 環境,獨立撰寫 X486 Pentium Processor 上的程式(可以連接一些 Timing Critial 的感測器 ),並可以在系統 Bootup 的時候啟動。
2. 結合 Intel Edison Arduino 的相容板 (Arduino Breakout Board)。
● 相容於 Arduino 開發環境,並能執行現存於 Arduino 板子上已開發過的軟體,無須重寫。
3. 軟體開發環境的多元化。
● 軟體工程師可以自由選擇 Intel XDK、Elipse、Arduino 開發環境,或直接使用 Linux。 並可選擇不同的程式語言:C/C++、Python、NodeJS 等;開發環境也提供許多完整的範例程式。
4. Intel 雲端應用網站結合。
● 物聯網的相關運用,Intel Edison 所連結的感測器資料可以上傳到 Intel 雲端。
二、開發機器手臂之工具需求
所需工具綜合整理如下:
● Intel Edison 主板
● Intel Edison Arduino Breakout Board (Arduino 相容板)
● 簡易型機器手臂一組
● 十字起子
● 三用電表
● 尖嘴鉗
● 杜邦縣
● 針腳
● 7-12v 直流變壓器
三、開發機器手臂之步驟
[步驟一] Intel Edision 環境安裝
至 Intel 網站,https://software.intel.com/enus/iot/hardware/edison/downloads
下載並參考 Intel 開發者網站詳細的安裝步驟:
https://software.intel.com/zh-cn/get-started-edison-windows-step1
有關安裝的程序,網路上文章已相當多,在此不贅述。
依以下步驟可以確定開發環境是否安裝無誤:
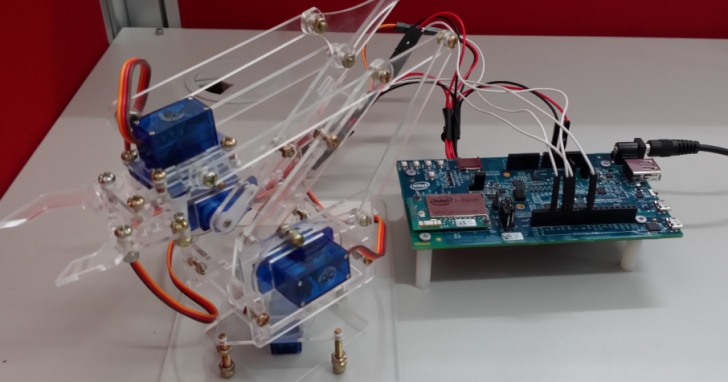
1. Intel Edison Arduino 延伸板是否已經與 PC 連接妥當,如下圖。

右上方電線為電源輸入,右下方第一條為 Micro USB 1;第二條為 Micro USB 2。
(1) 外接電源 ,需提供7~15v直流電源。
● PC 的USB port不足以提供足夠電源。
(2) MicroUSB-1 連接電腦之 USB Port, 並開啟 Putty 軟體連接正確 COM Port (以裝置管理員確認),如下圖,可進入 Edison 的 Yocto Linux 作業系統,如下圖。
(3) 如上圖,如果欲選擇使用 Putty SSH(Connection Type 選項),需以 Wi-Fi 方式登入 Edison 之 Linux 系統。開啟 Edison 之 Wi-Fi,可先登入 Linux 環境並執行指令:#configure_edision --wifi,指令執行之後,系統會掃描所有的無線 Wi-Fi AP;之後可選擇所欲連接的無線 AP 之 SSID。使用 Linux 指令#ifconfig,找出本機的 IP 位址,填入 Putty 的視窗中,再輸入 Linux 帳號密碼即可遠端登入。
(4) 而如果希望 Linux 系統開機後直接連上已選定無線 AP,可以直接修改以下檔案加入 SSID,執行以下指令:#vi /etc/wpa_supplicant/wpa_supplicant.conf ,如下圖。
(5) 利用 Micro USB-2 連接電腦另一個 USB Port,可開啟 Arduino 軟體開發環境,作為下載程式的 COM Port。
2. 確定 Edison 上使用的 Yocto Linux 作業系統版本號
值得需要注意的是:edison-image-ww18-15之後的版本 (例如下載官網網上的最新版是 edison-image-ww25.5-15), 在 Micro USB-2拔除後 Arduino 程式皆將不會繼續執行。請安裝ww18-15的作業系統版本,或參考以下網站之解決方案https://communities.intel.com/thread/77945,”Run Arduino Sketch on Boot Workaround”。
3. 軟體開發環境及程式語言有很多的選擇,如以下幾類:
(1) Intel XDK 開發環境 (程式語言:Node.JS)
● 提供許多完整的 API Node.Js 範例程式
(2) Elipse 開發環境(程式語言:C, C++)
● 提供許多完整的 API C++範例程式
(3) Arduino 開發環境(程式語言:Arduino-C)
● 可以直接使用 Arduino 提供的範例程式
本篇以選擇使用 Arduino 開發環境來說明機器手臂製作的過程。
[步驟二] 機器手臂組裝
▲組裝成品圖
[步驟三] 硬體線路連接
利用4個伺服機 Servos 來控制機器手臂的四個功能:底座旋轉、上臂控制、下臂控制、夾具控制。
(1) 每一個 Servo 有三隻腳位,”+”腳位連接至 Intel Edision 的 VCC 腳位,”-“腳位連接至 Intel Edision 的 GND,Servo 的 Pulse 信號腳位依序連接至 Intel Edison 的 PWM 腳位3,5,6,9。
下一頁繼續為你解說軟體程式碼部分~

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!