
你有沒有一邊打字一邊想拿起手機接電話或者一邊拿著咖啡杯一邊想開門時恨不得能有多一隻手的時候?近日,東京大學Inami Hiyama實驗室發明了一款用腳控制的機械臂MetaLimbs,「穿」上它之後,你就可以用腳來控制多出的兩隻「手臂」,來進行一些額外的工作。

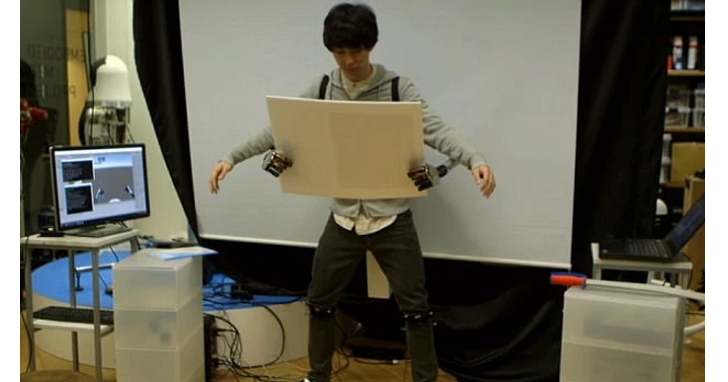
如上圖所示,使用者在膝蓋和腳出佩戴有具有傳感器的裝置,可以接受彎曲指令信號,機械手臂固定在使用者的背部並從身體兩側伸到前面,具有多個自由度,其中肘關節和腕關節以及手掌部分可以活動,接收到指令信號之後可以幫助用戶做出額外想要做的動作,為用戶提供了一雙「額外的手」。
MetaLimbs包括位置跟蹤系統和機器人手臂系統兩部分,研究人員表示,它的工作原理在於將腿部和腳步甚至腳趾的運動映射到軀幹上。比如,當使用者彎曲腳趾時,機器會受到指令,使得機械手完「握」的動作,以實現物體的抓取。比如當用雙手正在打字時,可以用過腳步控制以及腳趾的動作來控制機械手遞來一瓶飲料或者幫你拿著手機打電話,如下圖所示。
這個裝置可以供使用者站著或坐著使用,但在站著使用時,因為要彎曲膝蓋和腳趾,所以看上去像在跳一段尷尬的小舞蹈。
這套裝置的優點之一和特別之處在於可以用銲接工具、油漆刷等工具代替機械手,來協助用戶完成一些相應工作。
但是,編者認為這個機械手在實際操作上可能會存在一定的場景和運用侷限性。比如應用場景方面,當用戶想要完成站立移動時的抓握的動作時,實際在一邊行走一邊用腳趾和膝蓋彎曲來控制機械臂時會出現動作完成上的困難。
另外在坐姿的情況下,想像要一邊完成雙手的動作一邊用肢體來控制其他兩隻機械臂完成想要的動作,與人類本來的雙手運動行為模式訓練之間會出現一定程度上的衝突和不適應,可能會出現無法完成較為複雜的雙手運動情況下的機械手複雜連貫配合運動的控制的情況。
但無論如何,這都是一個好的想法,也為我們提供了一種用身體部位控制機械手來幫助用戶完成工作的新思路。

請注意!留言要自負法律責任,相關案例層出不窮,請慎重發文!